![[NER-12330]DC모터쉴드/DCMOT-SHIELD-L298 (DC Motor Shield(L298))](http://ohmye.co.kr/web/product/big/202212/2c0e7583ef661247ddf5a0b3244d0f6a.jpg)






| 상품명 | [NER-12330]DC모터쉴드/DCMOT-SHIELD-L298 (DC Motor Shield(L298)) |
|---|---|
| 상품요약정보 | 아두이노 보드의 DC 모터 드라이버 쉴드, 두개의 DC모터를 제어 할 수 있는 아두이노 모터 쉴드 입니다. |
| 판매가 | 27,500원 |
| 제조사 | 네로테크 |
| 원산지 | 국내 |
| 적립금 | 270원 (1%) |
| 상품코드 | P000BSPJ |
| 배송방법 | 택배 |
| 배송비 | 3,500원 (150,000원 이상 구매 시 무료) |
| 수량 |   |
| SNS 상품홍보 |
|---|

 |
(최소주문수량 1개 이상 / 최대주문수량 0개 이하)
사이즈 가이드 수량을 선택해주세요.
수량을 선택해주세요.
위 옵션선택 박스를 선택하시면 아래에 상품이 추가됩니다.
| 상품명 | 상품수 | 가격 |
|---|---|---|
| [NER-12330]DC모터쉴드/DCMOT-SHIELD-L298 (DC Motor Shield(L298)) |


|
27500 ( 270) 270)
|
| 총 상품금액(수량) : 0 (0개) | ||



1. 소개
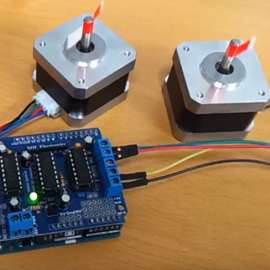
이 제품은 두 개의 DC 모터를 제어할 아두이노를 위한 모터 쉴드입니다.
이것은 LGS의 우수한 고전력 모터 드라이버 칩, L298P을 사용하여 제어가 용이하다.
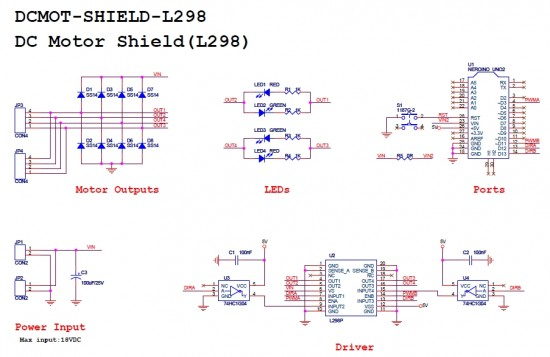
이 칩은 두 개의 양방향 DC 모터를 직접 구동이 가능하고, 보호를 위해 고속의 쇼트다이오드를 포함한다.
모터 출력 당 최대 2A의 전류으로 구동한다. 드라이버는 와이어 저항을 감소시키기 위해 다양한 브러쉬 디자인을 이용한다.
2. 사양
◆ 모터 드라이버 쉴드는 두 개의 DC 모터를 제어할 수 있습니다.
◆ L298 H-Bridge를 기반으로 채널당 최대 2A까지 구동할 수 있습니다.
◆ 쉴드의 전원은 아두이노 보드와 같은 VIN의 라인에서 얻어옵니다.
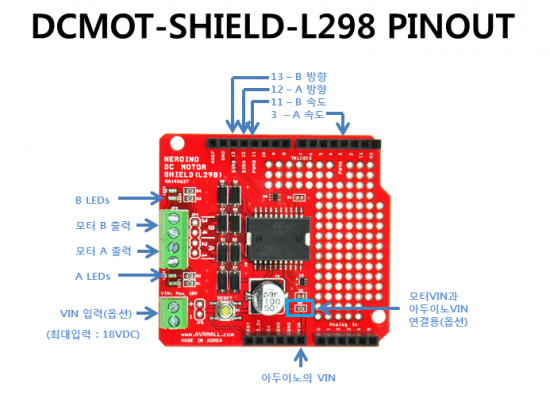
◆ 동작하는 방향을 표시하는 적색과 녹색 LED를 포함합니다.
◆ 모든 드라이버 라인은 역기전력(back-EMF)로 부터 보호하는 다이오를 가집니다.
◆ OUT1/2에 부착된 모터를 제어하기 위해서는 디지털라인 12(방향A)와 디지털라인 3(PWM A)에 연결되어야 합니다.
OUT3/4에 부착된 모터를 제어하기 위해서는 디지털라인 13(방향B)와 디지털라인 11(PWM B)에 연결되어야 합니다.
◆ VIN 연결이 아두이노 VIN에 직접 연결되며, 그래서 모두에 꼭 전원을 연결하지 않아도 됩니다.
◆ VIN (JP1)에 최대 18V까지 입력이 가능합니다.
◆ 모듈 크기 : 58mm x 53.4mm x 21mm (가로 x 세로 x 높이)
◆ 모듈 무게 : 대략 g
3. 핀아웃(Pin Out)
4. 회로도(Schematic Diagram)
5. 관련 문서 링크(Link Documents)
◆ Datasheet (L298)
◆ GitHub
6. 샘플코드(Sample Code) - 아두이노 코드
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 | // # Arduino Sample Code // # www.neromart.co.kr // # // # Description: // # The sketch for using the DCMOT-SHIELD-L298 // # // # Three useful functions are defined: // # setupArdumoto() -- Setup the Ardumoto Shield pins // # driveArdumoto([motor], [direction], [speed]) -- Drive [motor] // # (0 for A, 1 for B) in [direction] (0 or 1) at a [speed] // # between 0 and 255. It will spin until told to stop. // # stopArdumoto([motor]) -- Stop driving [motor] (0 or 1). // # // # setupArdumoto() is called in the setup(). // # The loop() demonstrates use of the motor driving functions. // # Connection: // # DIRA pin -> Digital pin 12 // # PWMA pin -> Digital pin 3 // # DIRB pin -> Digital pin 13 // # PWMB pin -> Digital pin 11 // # // Clockwise and counter-clockwise definitions. // Depending on how you wired your motors, you may need to swap. #define FORWARD 0 #define REVERSE 1 // Motor definitions to make life easier: #define MOTOR_A 0 #define MOTOR_B 1 // Pin Assignments // //Default pins: #define DIRA 12 // Direction control for motor A #define PWMA 3 // PWM control (speed) for motor A #define DIRB 13 // Direction control for motor B #define PWMB 11 // PWM control (speed) for motor B void setup() { setupArdumoto(); // Set all pins as outputs } void loop() { // Drive both driveArdumoto(MOTOR_A, FORWARD, 255); // Motor A at max speed. driveArdumoto(MOTOR_B, FORWARD, 255); // Motor B at max speed. delay(1000); // Drive forward for a second // Now go backwards at half that speed: driveArdumoto(MOTOR_A, REVERSE, 255); // Motor A at max speed. driveArdumoto(MOTOR_B, REVERSE, 255); // Motor B at max speed. delay(1000); // Drive forward for a second // Now spin in place! // driveArdumoto(MOTOR_A, FORWARD, 255); // Motor A at max speed. // driveArdumoto(MOTOR_B, REVERSE, 255); // Motor B at max speed. // delay(2000); // Drive forward for a second stopArdumoto(MOTOR_A); // STOP motor A stopArdumoto(MOTOR_B); // STOP motor B } // driveArdumoto drives 'motor' in 'dir' direction at 'spd' speed void driveArdumoto(byte motor, byte dir, byte spd) { if (motor == MOTOR_A) { digitalWrite(DIRA, dir); analogWrite(PWMA, spd); } else if (motor == MOTOR_B) { digitalWrite(DIRB, dir); analogWrite(PWMB, spd); } } // stopArdumoto makes a motor stop void stopArdumoto(byte motor) { driveArdumoto(motor, 0, 0); } // setupArdumoto initialize all pins void setupArdumoto() { // All pins should be setup as outputs: pinMode(PWMA, OUTPUT); pinMode(PWMB, OUTPUT); pinMode(DIRA, OUTPUT); pinMode(DIRB, OUTPUT); // Initialize all pins as low: digitalWrite(PWMA, LOW); digitalWrite(PWMB, LOW); digitalWrite(DIRA, LOW); digitalWrite(DIRB, LOW); } | cs |
상품의 사용후기를 적어주세요.
게시물이 없습니다

상품에 대해 궁금한 점을 해결해 드립니다.
게시물이 없습니다
고액결제의 경우 안전을 위해 카드사에서 확인전화를 드릴 수도 있습니다. 확인과정에서 도난 카드의 사용이나 타인 명의의 주문등
정상적인 주문이 아니라고 판단될 경우 임의로 주문을 보류 또는 취소할 수 있습니다.
무통장 입금은 상품 구매 대금은 PC뱅킹, 인터넷뱅킹, 텔레뱅킹 혹은 가까운 은행에서 직접 입금하시면 됩니다.
주문시 입력한 입금자명과 실제입금자의 성명이 반드시 일치하여야 하며, 7일 이내로 입금을 하셔야 하며 입금되지
않은 주문은 자동취소 됩니다.







법인명(상호) : 알제이(RJ)테크 대표자(성명) : 정제영 사업자 등록번호 안내 : [113-24-47248] 사업자정보확인
통신판매업 신고 2015-서울구로-0248 전화 : 070-8250-3303 팩스 : 02-6971-9251
주소 : 08206 서울특별시 구로구 신도림로 7 (신도림동) 금강리빙스텔 502호
개인정보관리책임자 : 정제영(rockjjy99@gmail.com) Contact rockjjy99@gmail.com for more information.
Copyright © 2017 오마이엔지니어. All rights reserved. Hosting by 심플렉스인터넷(주)